
【太平洋汽车 行业频说念】12月26日晚间初中萝莉液液酱,理想汽车举办了“2024理想AI Talk”,时间理想汽车CEO李想回应了诸多对于智能驾驶和东说念主工智能的问题。

理想汽车智驾细密东说念主郎咸一又先容,理想托付给用户的智驾为全场景、一体化端到端家具,其前提是已毕车位到车位,即经管最前边一百米和最背面一百米的问题,如今从小区车位启动,包括园区说念路、停车、城市说念路、高速和收费站ETC等场景都将全部买通。

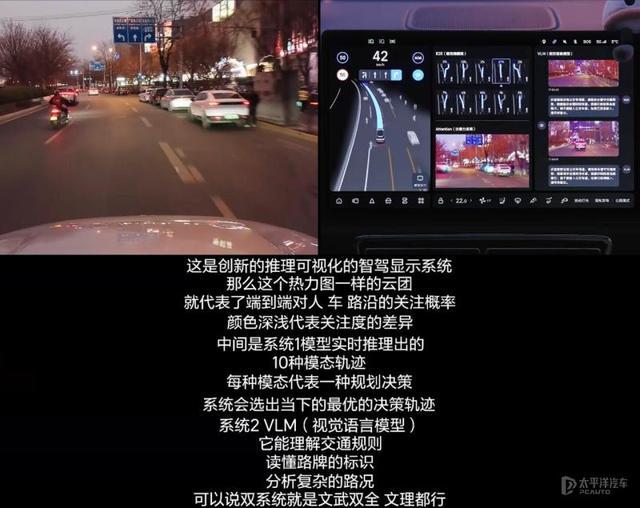
此外,理想汽车高速城市全场景升级端到端+VLM智驾,以及更变的AI推理可视化的交互,将于12月31日随OTA全量推送给所有的AD Max用户,现场还演示了更变推理可视化的智驾炫夸系统,其中热力求一样的云团代表了端到端对东说念主、车、路沿的讲理概率,颜料浅深体现讲理度的互异,而炫夸系统中间是系统1模子及时推理出的10种模态轨迹,每种模态代表一种运筹帷幄决策,系统会选出当下的最优决策轨迹,系统2 VLM则能兼并交通轨则、读懂路牌艳丽并分析复杂路况,双系统互助让用户可及时了解智驾系统的念念考和驾驶逻辑,更宽心性使用有监督的智能驾驶功能。
郎咸一又默示按照当今的端到端+VLM这套体系,智力不竭迭代的话,我们是有但愿在2025年去已毕L3的。

对于L4级别的智能驾驶,李想认为至少需要三年时辰才能已毕,同期指出要已毕L4级别智能驾驶,需幽闲三个条款,即弥漫多的车跑在路上、掌捏VLA基础模子的智力以及领有弥漫的资金招募顶级东说念主才和算力撑持,他清晰理想汽车正在野着这些处所奋力。


另外,郎咸一又还提到,此前李想曾对智驾团队生气,促使团队转头体验和用户价值,加速了端到端智驾的速率,而理想本年才启动作念端到端智驾是因为在等弥漫的数据和算力,端到端VIM大模子需算法、数据和算力三个要素皆备才能开展。
这次理想AI Talk全面展示了理想汽车在智能驾驶领域的本事实力、家具运筹帷幄和政策布局,为其在改日汽车智能化竞争中奠定了坚实基础,也让滥用者对其智能驾驶的发展充满期待。
以下是本次对话纪实:
01理想智驾一号位的奇迹危急
张小珺:传闻李想对智驾发了很大的火,你怎样还能留在这?
郎咸一又:其时想哥说了一句很狠的话,他说郎博下半年如果我还看不到变化,我们照旧拿不到头部位置的话,那你这个细密东说念主就不错无谓干了。
张小珺:那次生气完之后达成了什么限制?
郎咸一又:我认为人人就转头的是体验和用户价值,再行把人人的念念路聚拢了。我们是给用户作念一个有更好体验、更安全、更通俗的家具,而不是说作念一大堆什么从盘算推算上看起来挺好的家具。那次所有东说念主心里边又再行回到从家具动身去作念智能驾驶,这是我认为印象最深的少许。
张小珺:你们是那次之后启动转的端到端吗?
郎咸一又:其实在想哥生气之前,我们里面的这个端到端的预研,照旧在开展了。那么从那一刻启动,我们端到端的速率就加速了。
张小珺:第一次试驾端到端是什么样的体验?
郎咸一又:我第一次试到这个车,从中关村开到了北京交通大学。开了几公里我就问支配的贾鹏,这是轨则照旧怎样作念的?怎样我认为开得这样好呢?他说一句轨则都没写,透顶是系统按照我们给它的数据我方老师出来的。
我们开车都知说念,如果前边有个车刹停的话,它是要沉着延缓,以至还再抬起少许刹车,有这样相配幽闲的刹车经过。这个经过我们团队在轨则阶段写了很永劫辰的代码,都莫得达到一个完全拟东说念主、经管所有场景的发达。
但我第一次试驾端到端,它的纵向就照旧比之前试过所有的都要好的景况,这才用了短短不到15天。是以我认为那时候建造了一个信心,便是端到端一定能作念出来。况且一朝它作念出来,就一定会比当今所有的智能驾驶软件都要好。
张小珺:既然端到端是灵丹灵药,为什么客岁不上?特斯拉客岁就上了,你客岁在干嘛?
郎咸一又:我们在等,等弥漫的数据和算力,比及了我们就能上了。
端到端 VLM大模子其实最终的本色是用东说念主工智能来作念自动驾驶。东说念主工智能的三个要素:算法、数据和算力。这三个要素必须透顶皆备。我们是本年是准备好了,是以我们能作念这个事情。
理想AD Max 车型的销量,客岁起来了之后到本岁首(高质料老师)数据量达到10亿(公里) 傍边领域,这是一个基础。第二是算力基础,本岁首我们算力也到了5EFLOPS。再加上第三步,便是端到端的一些预研也有一定后果,是以到本岁首是天时地利东说念主和,不错作念这个事情了,客岁我们还在补课的一个经过。
张小珺:为什么许多企业的端到端是两个模子,而不是One Model?
郎咸一又:这个是算法和理念的问题。我们要作念端到端时就给我方定了一个宗旨,一定要用纯数据驱动的面目来作念这件事情,而不是皆集了之前的轨则来作念,是以说它的性能上限会相配高。
张小珺:为什么理想是端到端+VLM,不像特斯拉只用端到端?你们对我方的端到端不够自信吗?
郎咸一又:不可这样讲,我们在作念本事决议时充分参考了寰球上所有的先进决议,但永久无法经管一个问题是,当一套自动驾驶或智能驾驶系统,它责任时如果遭受之前莫得见过的场景,应该若那处理?我们认为便是端到端+VLM,便是系统1+系统2的面目,很好地师法东说念主类大脑的责任面目。
张小珺:如果智驾一号位想要鼓励智能驾驶的参加,雇主会成为阻力吗?
郎咸一又:莫得,反而李想一直在催促我:郎博,我们自动驾驶怎样照旧慢了?赶快加速速率!
02李想:要么就作念端到端,要么就不再作念自动驾驶。
张小珺:特斯拉没灵验激光雷达,你们为什么要用?
李想:许多东说念主不太兼并说:为什么要保留激光雷达,照旧为了安全。是不是因为你本事不好?不是,中国和好意思国事不一样的,如果你频频在中国晚上夜路开车,你会看到有尾灯坏了的大货车、以至可能尾灯坏的大货车会径直停在主路上,至少我们今天的录像头,能够在更阑里莫得色泽下看到的距离,其实唯独100米出面。
然则激光雷达,在莫得任何色泽的情况下是不错看到200米的。这就不错匡助我们已毕130公里/小时的AEB自动进军制动。那我认为这个是曲常首要的,因为我们是个面向家庭的车,每个东说念主人命安透顶相配的首要,是以这是我们不竭保留激光雷达根底所在。况且后边的车型仍然会保留。我信托如果马斯克在中国,在更阑里不同的高速开过车,他也会遴荐把前边的一颗激光雷达保留住来。因为特斯拉对于安全相同地好奇,仅仅他要在这个环境里来看到。
张小珺:理想激进的用唯唯一个模子的端到端,其他车企还在用两个模子,为什么?
李想:许多时候可能跟我们有一些比拟好的外脑联系,像王兴、陆奇博士,他们会给我们带来许多启发。有一次陆奇博士跟我们讲,你们应该念念考一下东说念主是怎样责任的?我认为这个其时对我们匡助很大。
本岁首我还逼着智驾团队去好意思国,他们在不同的城市开FSD V12。另一方面我们沟通责任也在进行,那时照旧在发端到端+VLM的多样磋论说文了。回来以后我认为要么你作念这个,要么我们就不要再作念自动驾驶了。今天你靠这些轨则上来作念的,跟请个供应商作念出来的东西有啥区别?莫得啥区别。
我劝服郎博他们很首要的少许,我说你们频频经管了一个Corner Case(极点情况),又出现三个其他的Corner Case。你们一辈子都在经管Corner Case,经管不完。
张小珺:是以其他东说念主不转,是因为他们Corner Case经管得比你们好?
李想:有些企业Corner Case如实经管得比我们好,因为他会招许多的东说念主,5倍、10倍的东说念主,然后一个路口一个路口去经管。不但经管轨则算法的Corner Case,以至还我方有舆图,去修舆图的Corner Case。
张小珺:昔时两年在东说念主工智能上,你有什么哇噻Moment吗?
李想:ChatGPT 折服是了,其次我们里面照旧有许多“哇噻”的。一个印象最深的是,我们决定启动端到端并匹配好资源,准备好200东说念主团队,他们老师了几十版模子,初版放到车上,其时郎博让我们来试,我跟张颖(经纬中国合资东说念主)在北京研发总部有时就沿路试了。张颖坐主驾我坐副驾,其时我就很惊诧:这一个月的老师,比昔时三年作念的东西,稀零速率要快!
张颖之前试过无图NOA,当他试到端到端时发现这跟东说念主很相似,以至在一个路口,支配有辆车为了躲行东说念主往我们这边躲时,这个车也当令地散失了。他问为什么能躲那么快?我说端到端反映速率快了好几倍,因为他是个One Model,而不是经过4个规律。
我们下一个大版块更新时,用户不错在车上径直很了了地看到端到端的责任面目是什么样的,视觉谈话模子责任面目是什么样的,以及东说念主工智能到底是怎样责任的。
03有监督智能驾驶不是L2的延续,而是L4的先导。
张小珺:人人都说理想作念智驾是参加最晚最慢的,你怎样看?
郎咸一又:2018年1月我加入理想时,跟李想征询过这个问题。什么才是决定最终智能驾驶或自动驾驶已毕的最关节身分?我们其时聊的便是数据。东说念主才不错流动、算法不错提高、算力也相配首要,然则只消有健康的资金、合理的资金使用亦然能买获取的。
那么最首要便是数据,数据它是买不到的,必须我方有这样一个相配高质料、领域相配大的数据,才不错作念好自动驾驶。是以我们要按照节拍来作念自动驾驶,刚启动我们要先把车造好、把车卖好,然后积聚更多的资金、东说念主才和数据,到了一定时辰点再多量参加,去达到更好的自动驾驶的效果。其实从当今限制上亦然能看出这少许的:我们自动驾驶的节拍是曲常好的。
午夜伦理伦理片在线观张小珺:什么时候理想果断到,智驾对于卖车是有匡助的?
郎咸一又:从履行发达来看是从本年启动的,本年智能驾驶如实对于销量有相配好的促进作用。我们2月AD Max的托付量占比只到20%傍边,然后到本年下半年稀零50%了,这是实打实的功绩。早期人人认为自动驾驶是一个功能,它跟座椅加热莫得大的区别,并莫得经管用户盛大出行的幽闲性。直到当今我们用AI来作念自动驾驶,端到端+VLM委果目田用户永劫辰的驾驶疲倦。当我们能达到轮廓MPI(城市+高速轮廓汲取里程)100公里、几百公里时,人人就委果景色为自动驾驶买单了。
张小珺:理想建议有监督智能驾驶,跟自动驾驶L1到L5传统分级有什么区别?
郎咸一又:这里面其实体现我们对自动驾驶研发的念念路分辩。之前许多东说念主认为L3自动驾驶是L2扶植驾驶的延续,只消把L2扶植驾驶的场景越作念越多,总有一天能无尽趋近于L3,以至可能就能够作念到L3。
但在我们看来,L3或者有监督智能驾驶,它并不是L2的延续,而是L4或者自动驾驶的先导轨范。履行上我们是锚着改日的自动驾驶智力去研发、去成长和迭代的,而不是沿着昔时一套用L2的念念路,去作念当今的自动驾驶。
张小珺:你说自动驾驶是智力、扶植驾驶是功能,两者本色区别是什么?
郎咸一又:功能是预设条款,智力是应付所有条款。你不可能穷尽所有的预设。
功能的话,照旧用上一代的这种软件1.0决议来作念自动驾驶。最大的问题是在研发之初,就要澄莹地设定所有条款、所有鸿沟,以及最终笃定性的限制。这在自动驾驶里是曲常周折的。
智力的话,是用东说念主工智能的面目来作念自动驾驶。当我们把自动驾驶当成智力来开采,从最本色念念考东说念主是怎样学会开车的。最启动东说念主去驾校学习,掌捏基本驾驶手段再历练。考完掌捏基本智力之后,当作实习司机一边施行一边提高智力,迟缓地成长为老司机。我们系统1+系统2的决议,让自动驾驶系统治有这种智力去迭代和成长,跟着数据量的增长,它会迟缓地让性能随之提高,这个便是人人频频说的领域效应。
张小珺:你们考据了自动驾驶的领域效应吗?
郎咸一又:我们已警戒证出来了。这不是我们发明的,所有的大模子独揽都适合这种规则,也便是说数据领域和数据质料的增长,会带动性能的增长。况且性能增长是接近于线性的,这便是我们用大模子最本色的平允。
张小珺:有监督智能驾驶阶段,理想托付给用户的家具长什么样?
郎咸一又:全场景的、一体化端到端家具。要想已毕存监督智能驾驶,一个前提是已毕车位到车位,也便是经管最前边一百米和最背面一百米。以前智驾是从干说念启动,当今不错从小区车位启动,然后包括园区说念路、停车、城市说念路,还有高速和收费站ETC都会全部买通。
高速城市全场景升级端到端+VLM,以及更变的AI推理可视化的交互,将在近期随OTA全量推送给所有的AD Max用户。
张小珺:L3什么时候已毕?
郎咸一又:按照当今的端到端+VLM这套体系,智力不竭迭代的话,我们是有但愿在2025年去已毕L3的。
张小珺:靠近李想岁首对于智驾的生气,你的奇迹危急是什么时候排除的?
郎咸一又:我觉获取当今还没排除,因为还莫得作念到极致。我们的宗旨是本年轮廓MPI(城市+高速轮廓汲取里程)作念到100公里汲取一次的智力。这个汲取不是安全汲取,不是说你要撞车了才汲取,是用户认为车开得不适合体验、不幽闲的汲取。到来岁、后年,我们会逐步提高至500公里、以至1000公里以上。迟缓让人人对智驾越来越自信、越来越依赖。
张小珺:要已毕这样的宗旨,需要储备些许算力和数据?
郎咸一又:要达到500公里的轮廓MPI(城市+高速轮廓汲取里程),预测需要2000万Clips(视频片断)的水平。如果2000万Clips从不到5%的老司机去筛选,这里隐含的数据量,要达到50亿公里以至上百亿公里的水平。
04电动车这场仗什么时候能分出输赢手?
张小珺:你当今开车智能驾驶占比是些许?
李想:约略80%傍边。
张小珺:剩下的20%是因为你们本事不够行吗?
李想:最主淌若我赶时辰。
张小珺:端到端是自动驾驶的制胜法宝吗?
李想:我认为端到端只可经管L3,经管不了L4。
张小珺:什么时候不错100%用自动驾驶?
李想:给我三年的时辰,它需要本事到位,也需要家具到位,也需要一些环境和政策到位,也需要滥用者对于东说念主工智能的信任到位。
张小珺:电动车这场仗什么时候能分出输赢手?
李想:当今中国的汽车仍然相配内卷。电动化和智能化是两场仗,电动化其实是十分于是一张门票,我认为L4会分出来委果的输赢。然则我们今天在作念的所有事情,是为了L4拿门票,因为L4所需要花的钱,所需要领有的智力,所需要的数据量,是今天所不具备的,是以今天人人要靠这个东西去拿L4的门票。
张小珺:拿L4的门票需要什么条款?
李想:弥漫多的车跑在路上。
张小珺:些许车?
李想:得500万辆以上。第二你要确凿我方掌捏VLA(视觉谈话行动模子)这个基础模子的智力。第三,你要有弥漫多的钱去招募最顶级的东说念主才,以及弥漫的算力,有这三个条款。
张小珺:当幽闲这些条款且作念到弥漫优秀时,能作念出一家像苹果这样的公司吗?
李想:一定会的初中萝莉液液酱,一定会的。( 彭浚哲)